En un futuro no muy lejano, tendremos robots autónomos en casa y en el lugar de trabajo y nos desplazaremos por la ciudad en vehículos autónomos capaces de interactuar entre ellos para organizar el tráfico. Y en estos avances en su día soñados por los autores de ciencia-ficción, tienen mucho que decir los investigadores de la Universidad de Almería (UAL), una potencia en cuestiones de Robótica.
El grupo de investigación Automática, Robótica y Mecatrónica (ARM) de la UAL tiene en marcha varios proyectos con robots que prometen facilitar el día a día de los humanos. Se aplican a ámbitos tan diversos como la agricultura, la movilidad urbana o la salud. Y suponen un paso adelante respecto a proyectos anteriores, con los que los miembros de este grupo de investigadores han ido haciéndose un nombre entre las figuras destacadas de la robótica.
Uno de los proyectos más recientes es el del Agricobiot. Con él, el grupo de investigadores planea agilizar los procesos de recolecta y selección de productos agrícolas de invernadero. Tienen experiencia en este ámbito, porque en su momento ya desarrollaron el Fitorobot, con el que se pulverizaban los productos fitosanitarios y se evitaba así que el agricultor entrase en contacto con ellos. Ahora, lo que se está diseñando es un robot colaborativo, un ‘cobot’, que se encargue de recoger los productos que vaya cosechando el agricultor y los lleve al almacén cuando tenga la carga completa. “La principal novedad de la propuesta es trabajar cerca de la gente”, explica Juan Carlos Moreno, uno de los integrantes del grupo ARM al frente del proyecto.
Robots colaborativos
La técnica para manejar robots en entornos ‘controlados’, en los que no haya humanos interponiéndose en su camino y pueda realizar tareas repetitivas a la mayor velocidad posible, está dominada desde hace décadas, desde que en los años cincuenta del siglo pasado comenzaron a utilizarse los primeros en fábricas de automóviles.
Con el paso de los años, se ha ido extrapolando esa robótica industrial a otros sectores, al de los electrodomésticos e incluso al agroalimentario. “En una fábrica de zumos o de gazpacho, por ejemplo, primero se somete el producto a un determinado proceso y luego se envasa, después se coloca en cajas y se paletiza, y ahí es donde empiezan los robots, metiendo las cosas en cajas y transportándolos”, detalla Moreno, que explica que “los primeros son robots industriales y los segundos, robots móviles”.
Estos robots han estado aislados de los humanos, porque las altas velocidades a las que se mueven y el peso que tienen harían mortal cualquier golpe a una persona. Así, el humano tenía su tarea, “una labor inteligente”, y el robot, la suya, “una labor de precisión”, con cargas pesadas y de modo repetitivo. Pero ahora, explica Moreno, “la tendencia está cambiando y se ha visto que puede ser interesante que el robot esté más cerca del humano, que no exista esa barrera física y que puedan trabajar cerca”. Para ello, hay que conseguir que “si el robot detecta que se acerca un humano, reduzca su velocidad y si se acerca mucho, se pare”. En esto consistiría el llamado robot colaborativo o ‘cobot’.
Agricobiot
En esta categoría entra el Agricobiot, acrónimo de ‘agri’, ‘cob’ por colaborativo e ‘IoT’ (siglas en inglés del “internet de las cosas”). En una nave, los robots móviles funcionan porque “está todo estructurado, cada estantería está siempre en su sitio y el robot ‘sabe’ dónde tiene que coger y dejar las cosas, porque no cambia”, explica Antonio Giménez, miembro del grupo y director de la Oficina de Transferencia de Resultados de Investigación de la UAL (OTRI).
En un invernadero sí hay cambios, según van creciendo las plantas, cada una a su ritmo, y de forma diferente entre un cultivo y otro. Por eso no buscan que el robot recolecte la producción, porque sería muy complicado. “La persona lo recoge y lo echa al carrito, y nosotros investigamos cómo se mueve ese carrito de forma autónoma por dentro del invernadero”, explica Giménez.
El plan es que el humano vaya recolectando y colocando lo que cosecha en cajas transportadas por este robot. Cuando la carga se completa, el robot se va a la zona de descarga a la vez que llega otro para sustituirlo. “Tendríamos una flota de robots que trabajan de forma colaborativa con el humano”, apunta Juan Carlos Moreno, que añade que “al moverse por el invernadero, lleva una serie de sensores que le permiten captar información de todo lo que ocurre, para luego tomar decisiones o asistir al humano para que las tome él”.
Por ejemplo, si lleva una cámara multiespectral puede detectar problemas en las plantas y dar un aviso. “Para hacer ese tipo de identificación, el trabajo de visión artificial, en el que se requieren técnicas de ‘machine learning’, el sistema completo estará conectado a la nube”, explica Moreno.
Ahí es donde entra la parte de internet de las cosas. Habrá múltiples sensores en el invernadero, “que dejará de ser algo pasivo, estará captando información continuamente, subiéndola a la nube, y las máquinas que se mueven allí se podrán conectar para, en base a esos datos, tomar decisiones”.
Y no solo esto, sino que también se busca que “otras máquinas que haya en otros invernaderos de una zona geográfica cercana puedan tomar esa información para extraer conclusiones de lo que pasa en ese invernadero y tomar así decisiones para su invernadero, para evitar que pase lo mismo”.
Robots humanoides
Aparte de estos proyectos para la agricultura, el ARM trabaja en líneas relacionadas con la salud. Hace unos años, ya probaron cómo ayudar a enfermos de Alzheimer utilizando robots Aisoy, que interactuaban con las personas mayores proponiendo distintos tipos de ejercicios de memoria. El problema es que este robot tenía ciertas limitaciones a la hora de llevar a cabo esa interactuación y el proyecto acabó parado.
“Ahora tenemos dos robots sociales más avanzados”, cuenta Moreno. Uno de ellos es Nao, “un robot humanoide que se suele usar mucho para trabajar con niños con problemas del espectro autista”, señala. Se trata de un robot que “mide unos 70 centímetros de alto, con piernas y brazos, visión 3D, posibilidad de moverse, por ejemplo bailando, lo que sirve para hacer que el niño imite al robot, y con capacidad de reconocimiento de voz y de caras”. El otro es Pepper, “el ‘hermano mayor’ del Nao, que mide un metro y medio de altura más o menos y se suele usar con personas mayores”.
Asimismo, están trabajando en robótica para rehabilitación. “En esta línea, empezamos a trabajar en un exoesqueleto de mano”, cuenta. Para ello, se hizo el diseño en base a distintos TFG que proponían diferentes problemas. “Se diseñó una prótesis de mano y se llegó a construir un dedo con una impresora 3D, al que se dotó de parte electrónica para controlarlo, pero se ha quedado un poco en suspenso”, continúa. La intención es, no obstante, retomar esta línea utilizando además un kit de bioseñales adquirido por el grupo, que detecta señales bioeléctricas generadas por los músculos o por las neuronas.
El proyecto puede recordar a películas situadas en el futuro. La idea es “calibrar el sistema para identificar las señales que se generan y asociarlas a la intención que tiene la persona que está generando esas señales”, explica Moreno, “y esa intención, la traducimos en lo que nosotros queramos, que en nuestro caso será el movimiento de un robot”. Es decir, que lo que se conseguiría es “hacer que el robot se mueva con el pensamiento”. Para una persona con problemas de habla o que no pueda moverse “sería un avance importante”.
Ciudad inteligente
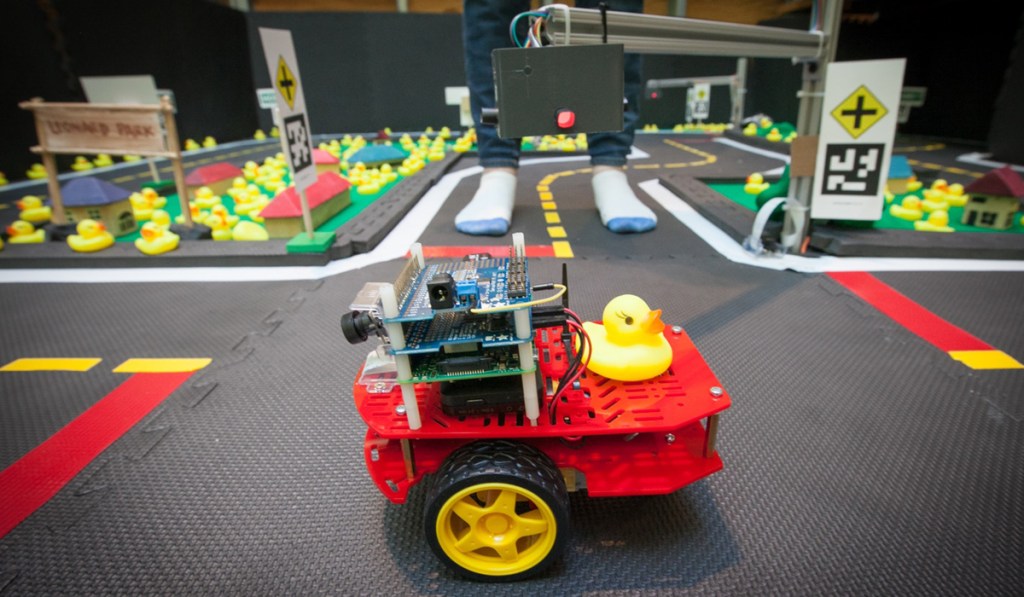
Otro de los proyectos en los que trabajan es en la conducción autónoma. Para ello, cuentan con una ‘ciudad inteligente’ en miniatura, que han bautizado ‘Duckietown’. En ella se muestra cómo se desplazan los vehículos de forma autónoma. “Son vehículos pequeñitos con ruedas, que tienen una cámara y con ella reciben información del entorno”.
Estos vehículos autónomos son capaces de centrarse en los carriles de la carretera y de identificar cuando llegan a un cruce y pararse. Asimismo, utilizando un código de luces de colores, “son capaces de comunicarse con otros coches”. Esta comunicación, en la vida real, “se hará a través de las redes 5G”.
Al final, lo que se busca es evolucionar en la conducción autónoma, avanzar una solución al problema de tener un parque de coches autónomos moviéndose por la ciudad, que tienen que ir de un sitio a otro y “hacerlo de forma óptima y sin intervención del humano”.
Una versión portátil de ‘Duckietown’ la utilizan para llevar a colegios, con idea de fomentar las vocaciones científicas en los pequeños alumnos, y a eventos como la Noche de los Investigadores, donde además lanzan cada año el Desafío del Club de Robótica, que, integrado en el grupo ARM, se encarga de organizar varios de eventos de difusión y promoción a la vez que se busca que los jóvenes desarrollen un interés por la materia. Así, por ejemplo, cada año programan una serie de charlas en colegios e institutos y participan en actividades como la Semana Europea de la Robótica.
Uno de los investigadores del grupo, José Luis Blanco Claraco, es el desarrollador de un “software de localización y mapeo simultáneo para desarrollar una nuevo robot móvil que se pasea por los hospitales y las UCI de forma que puede vigilar a los pacientes, los monitoriza y puede servir de base móvil a médicos que estén en otros hospitales ofreciendo su asistencia en telemedicina”, según contaba el año pasado, al ser galardonado con el Premio a Jóvenes Investigadores del Consejo Social de la UAL.
En sus investigaciones, se ha ocupado de los cuatro problemas principales que hay que solucionar a la hora de desarrollar un robot móvil: “La percepción, que consiste en coger todos los sensores e interpretar qué hay en su alrededor, la localización, que consiste en que un robot sepa dónde está, una especie de GPS genérico, sin necesidad de que le llegue ningún satélite y que funcione en exteriores e interiores, construcción de mapas, que consiste en integrar todos los sensores en un modelo mental, una especie de mapa de lo que hay a su alrededor, que le sirva para localizarse, y, por último, la navegación autónoma o evitación de obstáculos, del tal manera que el robot tiene que llegar de A hasta B y por el camino tiene que planificar una trayectoria y esquivar obstáculos inesperados, y personas que se crucen con él”.
First Lego League: desafío, juego y robots
Una de las actividades más relevantes a la hora de impulsar las vocaciones en ciencias y robótica es la First Lego League, un programa que permite a los jóvenes disfrutar con la ciencia, la tecnología, la ingeniería y las matemáticas a través de un aprendizaje lúdico. La Universidad de Almería ha venido acogiendo desde 2015 la fase final provincial, organizada por el Club de Robótica de la UAL, que está integrado a su vez en el grupo de investigación ARM.
El objetivo de la First Lego League es “inspirar a los jóvenes en la generación de ideas, resolución de problemas y superación de obstáculos, a la vez que les permite ganar confianza en el uso apropiado de la tecnología”, según la organización de este evento internacional, que destaca que “los participantes colaboran, cooperan y desarrollan habilidades de trabajo en equipo imprescindibles en un mundo laboral dinámico y en constante cambio”.
La First Lego League se divide en tres categorías. Para jóvenes de entre 10 y 16 años está la First Lego League Challenge, que consiste en un desafío para solucionar un problema real de ciencia y tecnología, para el que los participantes buscan una solución creando sus propios diseños de ingeniería. Los ganadores de la fase local pasan a la nacional y de esta salen los clasificados para la competición internacional. Se valoran tres conceptos: el proyecto de innovación, el juego del robot y la prueba de valores. En un escalón previo está la First Lego League Junior, adaptada a niños de entre 6 y 10 años. E incluso existe la First Lego League Discovery, para pequeños de entre 4 y 6 años.
En la fase local almeriense, “suelen participar unos 16 equipos, excepto en 2020, que hubo menos a causa de la pandemia”, explica Juan Carlos Moreno. El coronavirus, de hecho, obligó a celebrar la liga en formato online. “Salió bien, se implementó todo y la gente trabajó en sus centros” destaca Moreno, que señala que “los jueces también estaban conectados por videoconferencia” y que el evento “se retransmitió en directo en streaming, en YouTube”.
Para este profesor e investigador, una de las cualidades de la First Lego League es que sirve para “poner en valor las disciplinas STEAM”, que son ciencia, tecnología, ingeniería, arte y matemáticas, por sus siglas en inglés, entre niños desde tan solo 4 años.
Asimismo, este programa destaca que la participación en un evento de este tipo hace que los jóvenes se inspiren a la hora de generar ideas, resolver problemas y superar obstáculos. Y al mismo tiempo, comienzan a desenvolverse, los más pequeños, con la tecnología, mediante un uso adecuado de esta. Asimismo, se destaca que el desafío fomenta la colaboración y el desarrollo de habilidades de trabajo en equipo, fundamentales para el futuro entorno laboral de los participantes.
(Reportaje publicado en el número de julio de 2022 de la revista Foco Sur).

Deja un comentario